Diseño gráfico y analítico de un mecanismo de 4 barras articuladas
Uno de los mecanismos más comunes es el de 4 barras articuladas, también denotado como RRRR, por que utiliza 4 pares de revoluta.
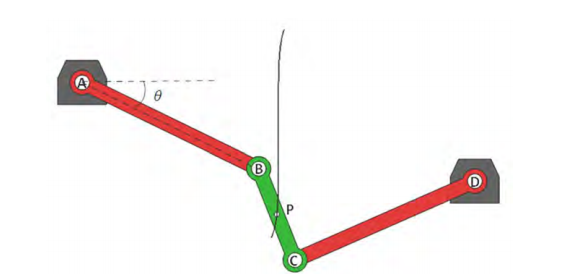
Este mecanismo está compuesto por:
a) Un eslabón fijo
b) Un eslabón de entrada
c) Un eslabón acoplador
d) Un eslabón de salida

Doble de Manivela



Análisis y creación de diseño gráfico:
En la generación de función es preciso correlacionar la rotación o el movimiento deslizante de los eslabonamientos de entrada y de salida.
La generación de trayectoria, un punto de un "eslabonamiento flotante" (no conectado directamente al eslabonamiento fijo)debe trazar una trayectoria definida respecto al marco de referencia fijo.
La generación de movimiento requiere que todo un cuerpo sea guiado a través de una secuencia de movimiento prescrita. El cuerpo que se va a guiar por lo regular es una parte de un eslabonamiento flotante.
Con el propósito de obtener el diseño del mecanismo actuador, se utilizó MATLAB para el cálculo requerido. En la tabla, se muestran las 10 posiciones utilizadas para determinar las dimensiones del mecanismo.

Se llevó a cabo el cálculo de dichos ángulos mediante el Toolbox de minimización restringida de MATLAB para cada posición del mecanismo. La siguiente tabla, muestra los valores de los ángulos para cada una de las posiciones que debe cumplir el mecanismo actuador.



Como puede observarse, el error de posición para cada uno de los diez puntos de precisión, es despreciable.
Comentarios
Publicar un comentario